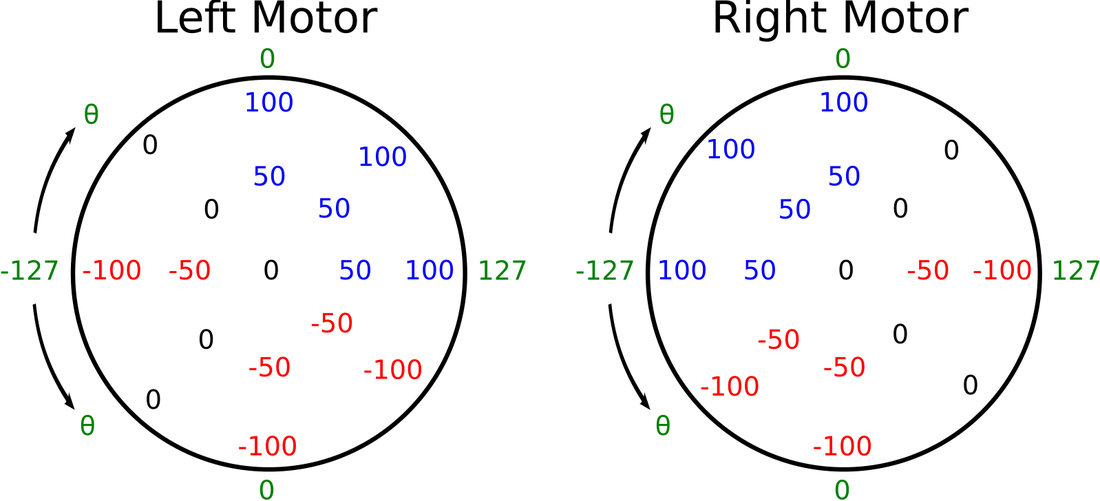
The last motor mapping did not give us the behavior we wanted. For example, if the controller is pointed forward and right you want the left motor at 100 and right motor at 0; this behavior was shown in the old motor mapping. If the controller is pointed completely to the right, you want the left motor at 100 and right motor at -100; this behavior was shown in the motor mapping as well. The controller is pointed back and to the right, you would want the right motor stopped and left motor at -100 (so the rear pointed to the right, like a car would); this behavior was NOT shown in the old motor mapping.
Instead the motor mapping should look something like this:
Instead the motor mapping should look something like this:
This translates into the following graphs, where if you can see, the reverse direction (sgn(y) < 0), which is quite complicated. These graphs are only for the case of full power (outer radius). We scale these graphs by the appropriate proportion of the full radius/power.
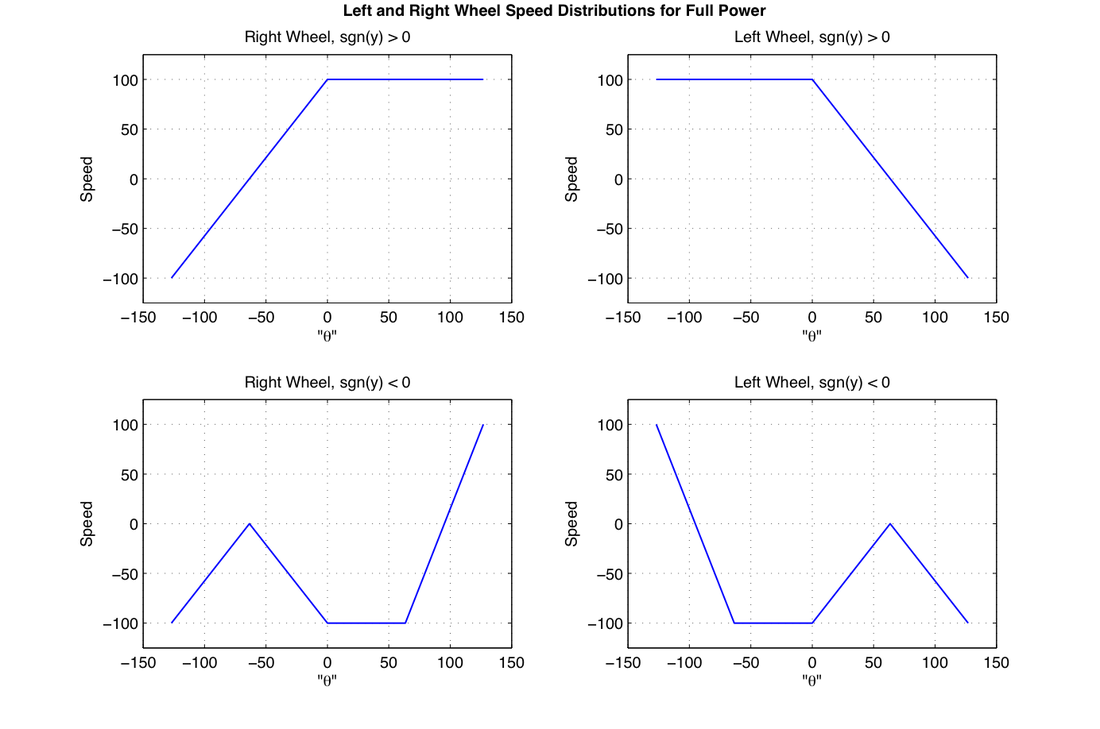
Update: This motor mapping (yet again) was not what we were looking for. The transitions in the reverse direction are just too harsh for us. We will work on another algorithm...